1.3.1 Aufgabenstellung
Aufgabe der Servo-Gruppe ist es erweiterte Funktionen für die Beleuchtung des Tisches bereit zu stellen. Das beinhaltet das mechanische betätigen des Kippschalters der Halogenlampe. Sowie eine zugehörige „Sleeptimer“-Steuerung.
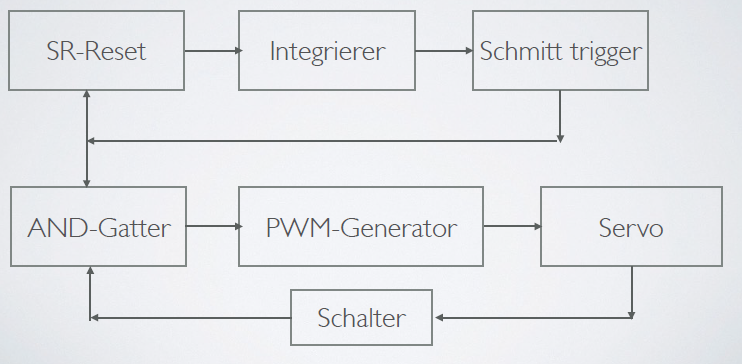
Abbildung 1: Blockschaltbild
1.3.2 Schaltung
Die Schaltung soll eine einstellbare und zeitgesteuerte Ausschaltfunktion für die Hauptlampe realisieren, zuzüglich soll das Wiedereinschalten für eine bestimmte ebenfalls regulierbare Zeit verhindert werden. Sie lässt sich in drei funktionale Schaltgruppen unterteilen. Diese sind: der „Sleeptimer“, ein PWM-Generator mit Servomotor und eine vergleichende Logik, welche die beiden anderen Schaltgruppen miteinander und mit externen Signalen verbindet. Abbildung 1 ist das zugehörige Blockschaltbild.
Einteilung der drei funktionalen Schaltgruppen:
1.) Der Analoge „Sleeptimer“ soll die Zeit messen bis die Lampe ausgeschaltet werden soll und die Zeit bis die Lampe wieder eingeschaltet werden kann. Dieser lässt sich ebenfalls wieder in drei Stufen aufteilen. Zu Beginn steht ein Taster, welcher ein SR-Flip Flop aktiviert. Dieser steuert einen Integrator, welcher aus einem OPV, Potentiometern und Kondensatoren besteht. Je nach dem wie die Potentiometer eingestellt sind verändert sich die Zeit die der Integrator braucht. Sobald der Integrator einen festgesetzten Wert erreicht hat verändert ein Schmidt-Trigger sein Ausgangssignal. Dadurch wird der Vergleicher Logik mitgeteilt das die Lampe aus sein und das SR-FF wird resetet. Durch den Reset wird der Integrator wieder in seinen Ausgangszustand zurückkehren. Ist dies passiert schaltet der Schmidt-Trigger ebenfalls wieder in seinen Ausgangszustand. Solange der Integrator in seinen Ausgangszustand zurückkehrt wird die Lampe ausgeschaltet
2.) Die Vergleicher-Logik besteht aus einem einfachen AND-Gatter. Es erhält als Eingangssignale den Zustand des Kippschalters der Lampe und den Ausgang des Schmidt Triggers. Wenn der Schalter auf „EIN“ steht und der Schmidt- Trigger das „Ausschalten“ Signal sendet, gelten alle Eingänge als Aktiv und das Gatter verändert das PWM-Signal für den Servomotor. – Der PWM-Generator besteht aus einem Rechtecks-Dreiecks-Generator welcher ein festgelegten Dreiecks-Singal liefert. Mit Hilfe einer internen erzeugten und festen Referenzspannung wird daraus ein gleichbleibendes PWM-Signal. Dieser Grundbefehl sagt dem Servomotor „Arm einfahren“. Die Vergleicher Logik kann einen Teil der Widerstände, welche zur Erzeugung der Referenzspannung benutzt werden, überbrücken. Dadurch verändert sich die Referenzspannungund das PWM-Signal. Der veränderte Befehl für den Servomotor bedeutet „Arm ausfahren“. Daraufhin wird der Schalter deaktiviert und der Grundbefehl wird wieder ausgesendet, der Arm fährt daher wieder ein und bleibt eingefahren.
1.3.3 Platine
Schnittstellen mit externen Baugruppen:
• Empfangene Signale:
– Zustand der Kippschalters der Hauptlampe
• Gesendete Signale:
– Keine
Die drei funktionellen Baugruppen wurden getrennt designt und ihren Anforderungen entsprechend dimensioniert. Nachdem die LT-Spice Simulation für den PWM-Generator und den „Sleeptimer“ die gewünschten Ergebnisse geliefert hat, wurden sie über die vergleichende Logik zusammengefügt. Der Steckbrettaufbau hatte das selbe Schema. Getrennter Aufbau der funktionellen Baugruppen und anschließendes Zusammenlegen selbiger. Während des Steckbrettaufbaus mussten diverse Anpassungen vorgenommen werden. Insbesondere der Kondensator des Integrators, der Stromverbrauch und das „Ausschalten“-Signal vom Schmidt Trigger bedürften einer Anpassung, dazu mehr im Abschnitt „Probleme und Lösungen“. Die Änderungen wurden in die LT-Spice Simulation eingefügt und das Gesamtkonzept in Eagle Schematic übertragen. An dieser Stelle stellten sich zwei Fragen:
- Wo sollte der Servomotor eingebaut werden?
Aus Platzgründen setzten wir den Servomotor direkt hinter die Blende und müssen daher die Platine auf zwei drittel ihre Größe Einkürzen. In der Blende ist ein Loch durch welches ein von Servo gesteuerter Arm Aus- bzw. Eingefahren werden kann.
- Wie werden die Bedienelemente an der Blende mit der Platine verbunden?
Die Wahl viel auf ein Flachbandkabel. Alle Bauteile welche auf der Blende sitzen müssen wurden aus der Schaltung entfernt und durch einen entsprechenden An- schluss für ein Flachbandkabel ersetzt. Das Kabel kann aufgeteilt werden und führt am Servomotor vorbei zu den Bedienelementen.
Um diese Anpassungen zu testen wurde der vorhandene Steckbrettaufbau angepasst und ein weiterer für die Bauteile der Blende angelegt. Abschließend wurden die vorher nur simulierten Quellen durch den vom Tisch benutzten BUS ersetzt. Der Schaltplan ist in Abbildung 2 zu sehen. Im Eagle-Board wurde wieder nach dem bekannten Schema vorgegangen. Aufteilen in Baugruppen, getrenntes designen selber und anschließendes zusammenfügen auf der gekürzten Euro-Platine. Da nicht alle benötigten Bauteile in der Eagle-Bibliothek vorhanden waren, musste hier mit Platzhaltern gearbeitet werden. Der Entwurf der Platine ist in Abbildung 3 zu sehen. Nachdem die Platine geätzt wurde, konnten die Bauteile eingelötet werden. Im Rahmen der Fehlersuche mussten vereinzelte Leiterbahnen getrennt und neue gelegt werden. Zudem mussten auch einige Bauteile gedreht werden, da die Pinbelegung der Eagle Bibliothek fehlerhaft war.
Abschließend wurde das Aussehen der Blende entworfen, zugeschnitten und mit Bauteilen bestückt. Alle Bedienelemente verfügen über ein Gewinde und werden direkt in die Blende eingesetzt.
1.3.3 Probleme und Lösungen
- Kondensator
Die Zeitkonstante des „Sleeptimers“ hängt von der Größer des Potentiometers und des Kondensators ab, beide müssen relativ groß sein. Vorrätige und bestellbare Folien- oder Keramikkondensatoren waren mit einer Ladezeit von ca. 3 min, bei verwendetem Potentiometer, zu klein. Die Größeren Elkos können nicht benutzt werden, da man diese nicht umladen kann.
Die Lösung war die Reduzierung der Zeitkonstante und die Verwendung von bipolaren Elkos. Diese verfügen über eine ausreichend große Kapazität und lassen sich umladen. Zur Testzwecken wurden mit einer Platz intensiven Verschaltung von Folienkon- densatoren bei Steckbrettaufbau gearbeitet.
- Strombegrenzung
Die Kraft des Servomotor hängt mit seinem Stromverbrauch zusammen. Je mehr Kraft der Servomotor aufwenden muss desto mehr Strom benötigt er. Das führt dazu das beim berühren des Kippschaltern oder wenn der Arm hängen bleibt sein Strombedarf soweit steigt, das das Netzteil des Tisches ihn nicht mehr decken kann. Um das zu verhindern musste eine Strom limitierende Schaltung für den Servomotor benutzt werden, welche verhindert das er mehr als 500 mA aus dem BUS zieht.
- AND-Gatter
Das AND-Gatter unterscheiden nur zwischen 2 Eingangssignalen, Low (ca. 0V bis 1V) und High (mehr als 1V). Das gesendete „Low“-Signal des Schmidt Trigger war aber größer als 1V und wurde daher von Gatter „fehlinterpretiert“. Der Schmidt Trigger wurde um einen Transitor erweitert der das benötigte „Low“- Signal ausgeben kann.
Im folgenden ist der Eagle-Schaltplan und das Board dargestellt:
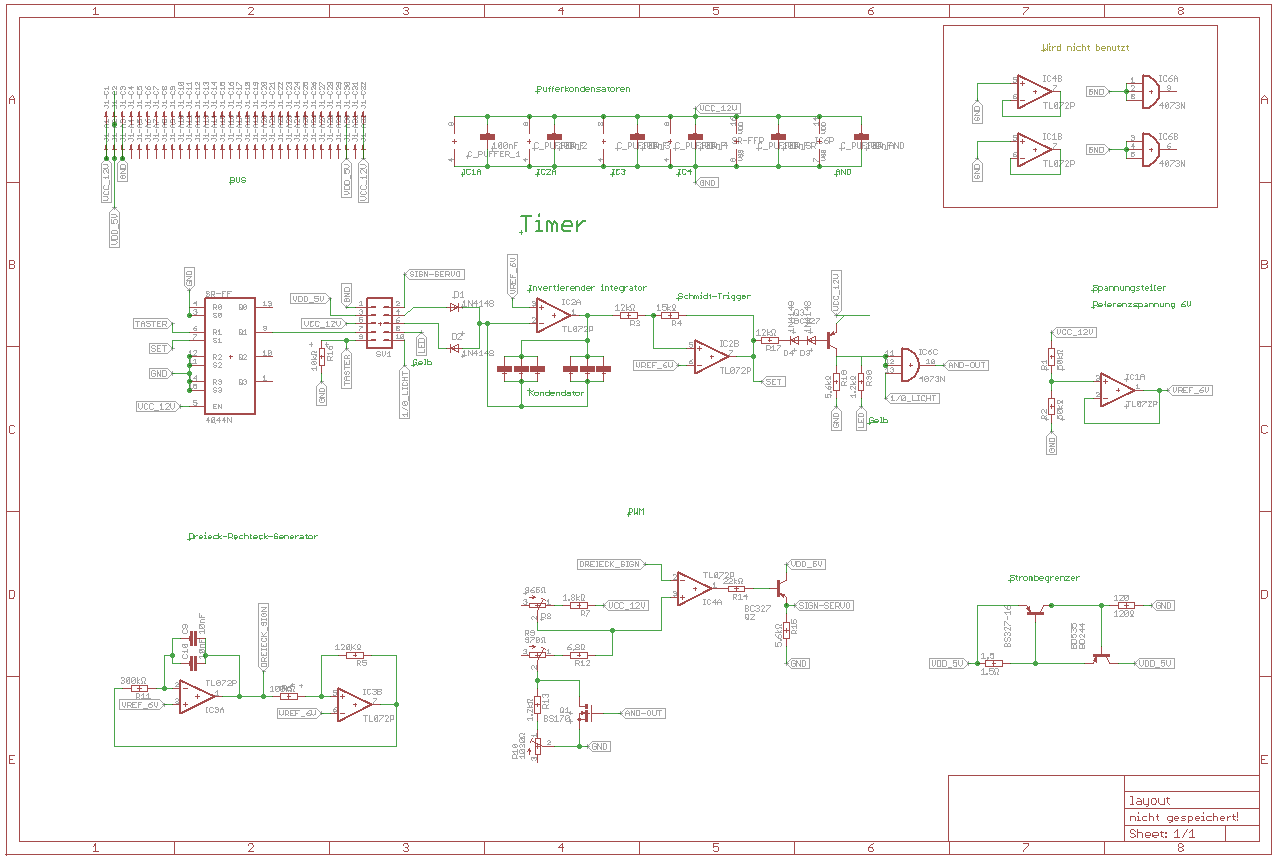
Abbildung 2: Schaltungsentwurf
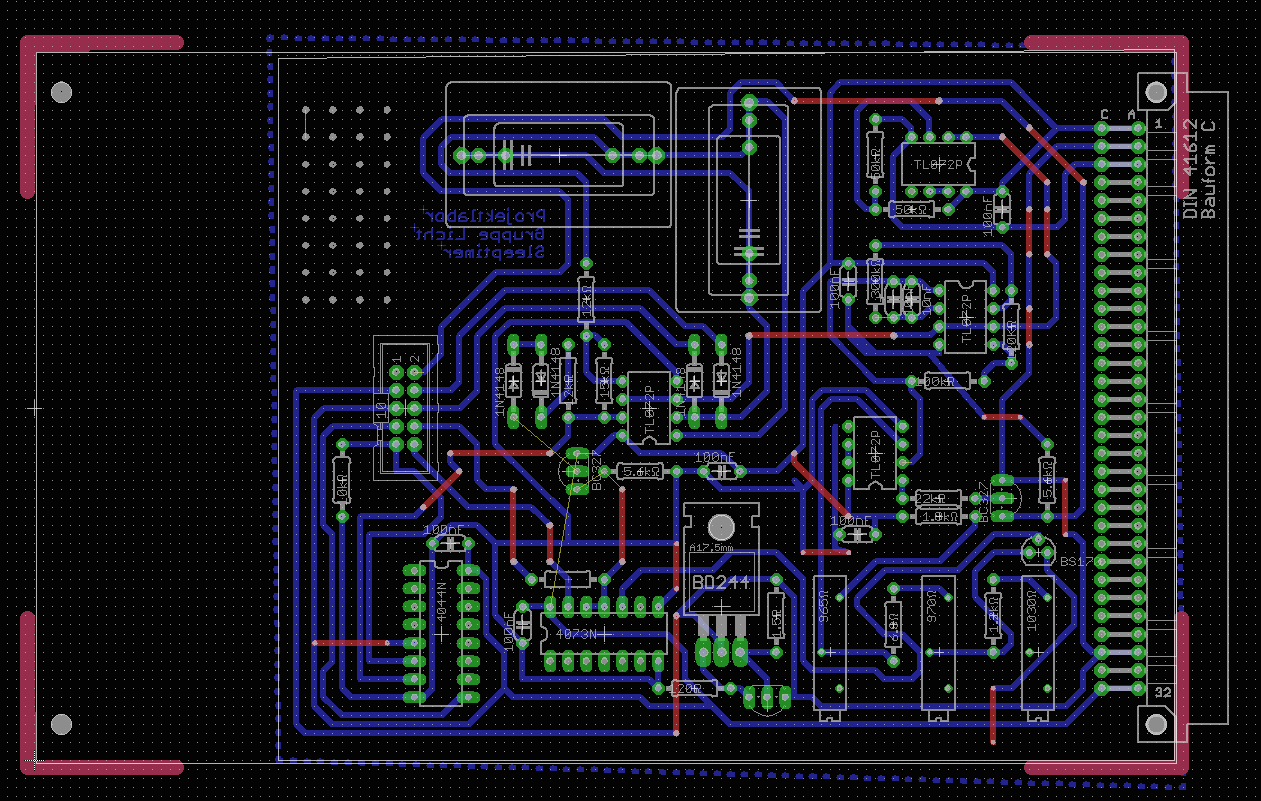
Abbildung 3: Platinen Layout
erstellt von Michael, Lucas, Nadav